 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

필수적인 기어: 그들의 주요 역할을 전송 시스템에서 분석하다
기어는 전동 시스템에서 매우 중요합니다. 자동차에서는 기어가 변속기에 핵심적으로 사용됩니다. 수동 변속기는 기어박스에서 기어를 사용합니다. 다양한 기어 조합은 가속, 순항, 오르막 주행 등 다양한 주행 상황에서 속도와 토크를 조정할 수 있게 합니다. 나선형 기어는 소음과 진동을 줄여 더욱 쾌적한 주행 경험을 제공합니다.
1, 기어의 종류와 기능
1.0. 기어의 종류
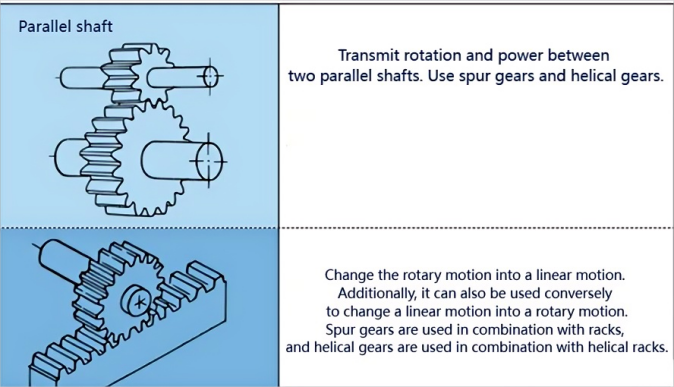
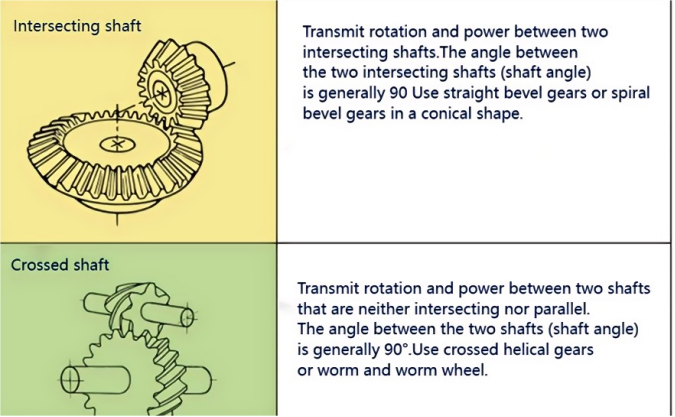
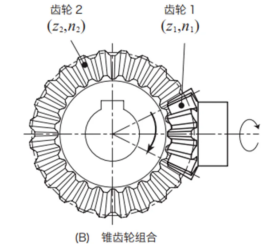
기어는 여러 가지 종류가 있습니다. 가장 일반적인 분류 방법은 기어 축에 기반합니다. 일반적으로 세 가지 유형으로 나뉩니다: 평행축, 교차축, 비틀림축입니다. 평행축 기어에는 직치기어, 나선형 기어, 내부 기어, 랙, 나선형 랙 등이 포함됩니다. 교차축 기어에는 직각 베벨 기어, 나선형 베벨 기어, 제로 베벨 기어 등이 있습니다. 비틀림축 기어에는 비틀림 나선형 기어, 웜 및 웜 휠, 하이포이드 기어 등이 포함됩니다.
(기어의 분류 및 종류).
|
기어 분류 |
기어 유형 |
효율성 (%) |
|
평행 샤프트 |
스퍼 기어 |
98.0-99.5 |
|
래크 |
||
|
내부 기구 |
||
|
나사 기어 |
||
|
헬리컬 래크 |
||
|
사다리꼴 톱니바퀴 |
||
|
교차축 |
직각 비스듬바퀴 |
98.0-99.0 |
|
나선 피니언 기어 |
||
|
0도 그리 그리 |
||
|
횡단축 |
횡단 나선식 기어 |
70.0-95.0 |
|
원통형 웜과 웜 휠 |
30.0-80.0 |
이 표에 나열된 효율은 전달 효율이며 베어링, 윤활 저항 등의 손실은 포함되지 않습니다. 평행 축 및 교차 축 기어 쌍의 맞물림은 기본적으로 구름이며 상대 슬라이딩이 매우 작아 효율이 높습니다. 비스듬한 축 헬리컬 기어, 웜 및 웜 휠과 같은 다른 비스듬한 축 기어 쌍의 경우, 회전이 상대 슬라이딩을 통해 생성되어 전력이 전달되기 때문에 마찰의 영향이 매우 크고, 이로 인해 전달 효율이 다른 기어에 비해 감소합니다. 기어의 효율은 일반적인 조립 상태에서의 기어 전달 효율입니다. 만약 부정확한 설치가 있다면 특히 원뿔 기어 조립 거리가 잘못되거나 원뿔 교차점에 오차가 있을 경우 그 효율이 크게 감소할 수 있습니다.
2.0 기어의 역할 기어
기어는 효과를 발휘하기 위해 반드시 쌍으로 사용해야 합니다
2.1 기계적 운동의 힘을 전달하다: 많은 자동차에는 많은 기어가 있습니다. 이러한 기어는 자동차나 다양한 다른 기계들의 작동을 돕습니다. 예를 들어, 자동차의 변속 장치와 산업용 감속기 등입니다. 기어의 역할로 인해, 이들이 정상적으로 작동할 수 있습니다.
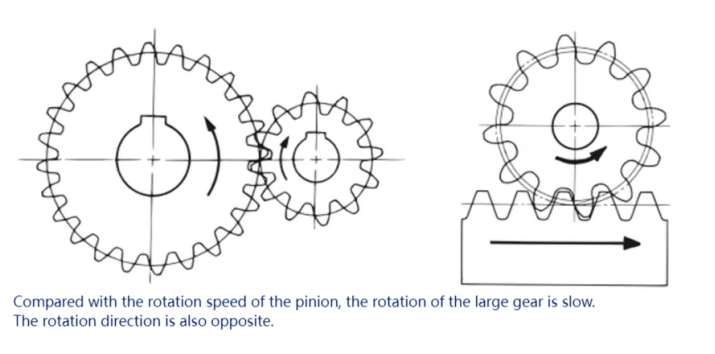
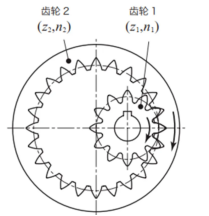
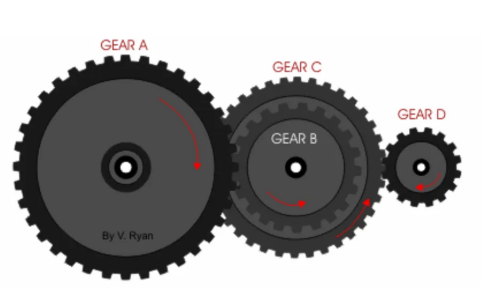
2.2 운동 방향 변경하기:
아래 그림은 서로 다른 기어 조합에 의한 운동 방향의 변화 법칙을 보여줍니다.
2.3 운동 속도 변경하기: 대소 톱니바퀴를 기계에 설치하면 기계가 빠르게 가속하거나 감속할 수 있게 되며, 예를 들어 감속기와 가속 장치 등이 있습니다.
2.4 토크나 비틀림을 변경: 대소 톱니바퀴의 조합은 톱니바퀴가 출력하는 토크를 변경합니다; (아래 세 번째 점에서 자세한 설명이 있습니다.)
2, 기어열의 전달비와 회전 방향
전달비는 메커니즘 내 두 회전 구성요소의 각속도 비율로, 속도비라고도 합니다. 구성요소 a와 b의 전달비는 i = ωa/ωb = na/nb이며, 여기서 ωa와 ωb는 각각 구성요소 a와 b의 각속도(라디안/초)이고, na와 nb는 각각 구성요소 a와 b의 회전수(분당 회전수)입니다.
1.단일 단계 기어 메커니즘: 한 쌍의 기어가 맞물려 형성된 기어 훈은 단일 단계 기어 메커니즘이라고 합니다.
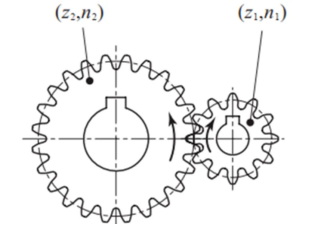
단일 단계 기어 메커니즘의 주동 기어의 치수를 z1, 회전 수를 n1, 피동 기어의 치수를 z2, 회전 수를 n2라고 하면 전달 비의 계산식은 다음과 같습니다:
전달 비 = z2/z1 = n1/n2
전달 비의 값에 따라 단일 단계 기어 메커니즘은 세 가지 범주로 나눌 수 있습니다:
전달 비율 < 1, 속도 증가 기어 메커니즘, n1 < n2
전달 비율 = 1, 일정 속도 기어 메커니즘, n1 = n2
전달 비율 > 1, 속도 감소 기어 메커니즘, n1 > n2
2.0 두 단계 기어 메커니즘: 두 단계 기어 메커니즘은 두 세트의 단일 단계 기어 메커니즘으로 구성됩니다.
다음 그림은 두 단계 기어 메커니즘의 구조를 보여줍니다.
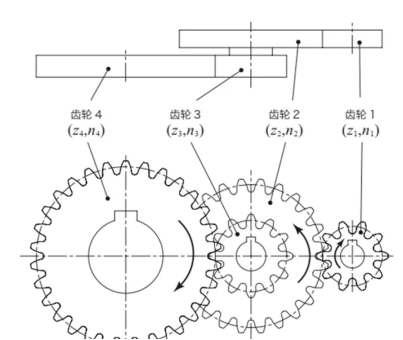
전달 비율 = z2/z1 * z4/z3 = n1/n2 * n3/n4.
이하에는 두 단계 기어 메커니즘의 전달 비율을 계산하는 예가 있습니다.
|
일련 번호 |
항목 |
코드 |
공식 |
계산 예제 |
|
|
PINION |
큰 기어 |
||||
|
1 |
첫 번째 단계 기어의 치수 |
Z1,Z2 |
설정 값 |
10 |
24 |
|
2 |
두 번째 단계 기어의 치수 |
Z3,24 |
12 |
30 |
|
|
3 |
회전 (기어 1) |
n1 |
1200 |
- |
|
|
4 |
전달비 (첫 번째 단계) |
1 |
Z2/Z1 |
2.4 |
|
|
5 |
전달비 (두 번째 단계) |
1 2 |
Z4/Z3 |
2.5 |
|
|
6 |
전달비 |
i |
i1×i2 |
6 |
|
|
7 |
회전 속도 (기어 2 및 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
회전 속도 (기어 4) |
n4 |
n1/i |
- |
200 |
|
회전 속도의 단위는 rpm입니다. 설정값은 설계자가 미리 설정한 값입니다. |
|||||
3, 토크, 파워 및 회전 속도 사이의 관계
먼저 몇 가지 공식을 살펴보고 이를 단계적으로 이해해 보겠습니다.
a. 물리학에서 힘의 모멘트는 힘 × 레버 암(직선)입니다. 힘의 모멘트를 계산하는 공식은 M = L×F입니다. 힘의 모멘트 단위는 뉴턴-미터로 간단히 N-m이라고 하며 기호는 N*m입니다.
레버 암 OA × 힘 Fa = 레버 암 OB × 힘 Fb.
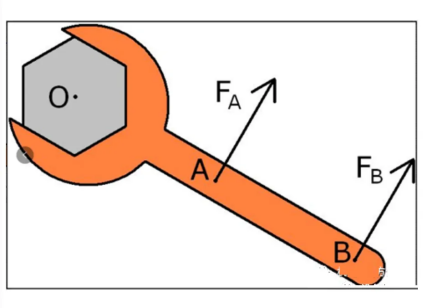
b. 회전 상태에서 토크(특수한 힘의 모멘트) = F(힘) × r(회전 반경), 즉 접선 방향의 힘과 그 힘이 작용하는 점까지의 원의 반지름의 곱이다. 토크를 계산하는 공식은: M = F*r이다.
c. 토크와 회전 속도 간의 관계: T = 9550P\/n, P = T * n\/9550; 여기서 P는 킬로와트(kW) 단위의 출력이고, T는 뉴턴-미터(N·m) 단위의 토크이며, n은 분당 회전 수(r\/min) 단위의 회전 속도이다. 9550은 상수이다.
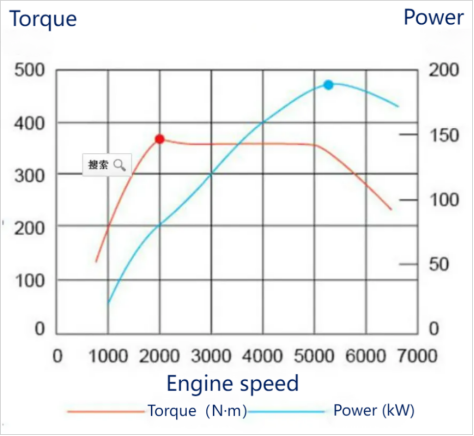
d. 출력과 토크 및 회전 속도 간의 관계: 출력(kW) P = 토크(N·m) T × 회전 속도(RPM) n\/9550, 즉 P = T*n\/9550으로, 다음 도표를 통해 이해할 수 있다.
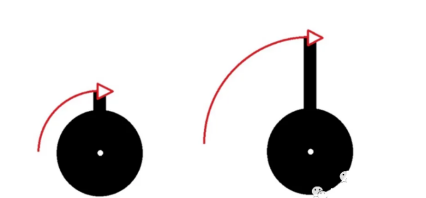
기어 회전 다이어그램에서 볼 수 있듯이, 전력은 변하지 않으며(전달 손실을 무시하면), 하지만 회전 속도는 감소합니다. 전력 = 토크 × 회전 속도(*상수)에 따르면, 바퀴 끝에서의 회전 속도가 줄어든 횟수는 바퀴 끝에서의 토크가 증가한 횟수와 동일합니다 - 이를 "바퀴 토크"라고 합니다.
예: 전력과 토크 및 각속도 간의 관계: 전력 P = 토크 T × 각속도 ω입니다.
전력 P = 작업 W ÷ 시간 t이고, 작업 W = 힘 F × 거리 s이므로, P = F×s/t = F×선속도 v입니다. 여기서 v는 선속도입니다. 엔진에서는 크랭크 샤프트의 선속도 v = 크랭크 샤프트의 각속도 ω × 크랭크 샤프트의 반지름 r입니다.
위 식에 대입하면 다음과 같다: 출력 P = 힘 F × 반지름 r × 각속도 ω. 그리고 힘 F × 반지름 r = 토크이다. 따라서, 출력 P = 토크 × 각속도 ω라고 결론지을 수 있다. 그러므로 엔진의 출력은 토크와 회전 속도로부터 계산될 수 있다.
그림 예시들.
보충 관계식: 아래는 균일 원운동에 대한 것이다.
1. 선속도 V = s/t = 2πR/T.
2. 각속도 ω = Φ/t = 2π/T = 2πf.
3. 선속도와 각속도의 관계: 선속도 = 각속도 × 반지름, V = ωR.
4. 각속도와 회전수의 관계 ω = 2πn (여기서 주파수와 회전수는 같은 의미임).
5. 주기와 주파수 T = 1/f.
주요 물리량 및 단위: 호 길이 (S): 미터 (m); 각도 (Φ): 라디안 (rad); 주파수 (f): 헤르츠 (Hz); 주기 (T): 초 (s); 회전수 (n): r/s; 반지름 (R): 미터 (m); 선속도 (V): m/s; 각속도 (ω): rad/s.




